Trimming virtueller Komponenten
Bei der bisherigen Beschreibung des Trimmings wurde davon ausgegangen, dass es ein technisches System aus verschiedenen Systemkomponenten gibt, und eine bestimmte dieser Komponenten soll jetzt entfernt werden, ohne dass sich die vom technischen System ausgeübte nützliche Funktion dabei ändert. Trimming kann jedoch auch verwendet werden, um auf effiziente Weise zusätzliche Funktionen in ein System einzufügen.
Hierzu wird zuerst eine zusätzliche virtuelle Komponente, die die gewünschte Funktion zur Verfügung stellt, dem technischen System hinzugefügt. Über den Aufbau dieser virtuellen Komponente braucht man nichts zu wissen, denn im nächsten Schritt wird sie bereits wieder getrimmt. Gemäß den Trimmingregeln wird die Funktion dieser virtuellen Komponente dabei auf eine der bereits im technischen System vorhandenen Komponenten übertragen. Die Trimmingregeln sorgen dafür, dass dabei die jeweils sinnvollste Komponente genutzt wird.
Die Funktion, die mittels einer virtuellen Komponente und anschließendem Trimming in das technische System eingeführt werden soll, kann nützlich oder schädlich sein. Das Einfügen virtueller Komponenten mit einer nützlichen Funktion ist das Kernstück von ARIZ. Dort wird eine solche virtuelle Komponente als X-Faktor bezeichnet.
Als ein Beispiel betrachten wir hier einen Ausschnitt eines Funktionsmodells eines einfaches Automobils.
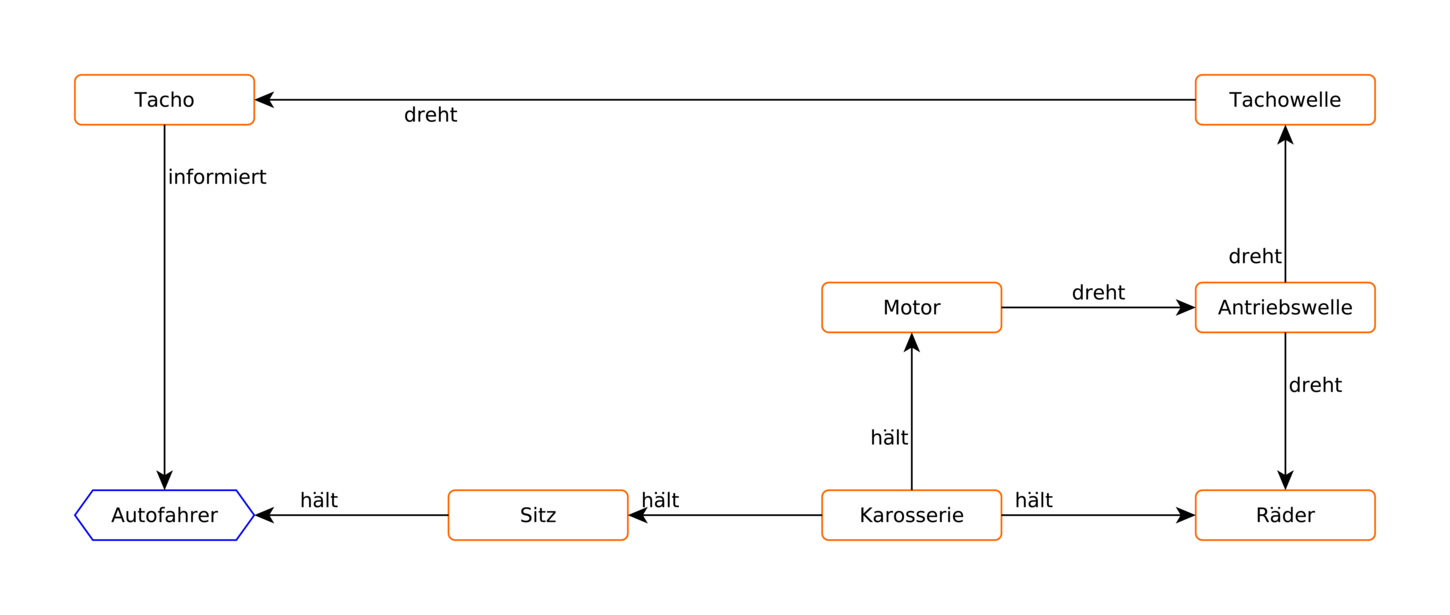
Ausschnitt aus dem Funktionsmodell eines Autos
Dieses Automodell soll nun verbessert werden, indem Scheibenwischer hinzugefügt werden. Hierfür wird neben einer Komponente „Scheibenwischer“ noch eine weitere Komponente, die für die Bewegung der Scheibenwischer sorgt, benötigt. Letztere Komponente wird jedoch als X-Faktor eingetragen, d.h., es wird nicht festgelegt, woraus diese Komponente eigentlich besteht, sondern nur, welche Funktion von ihr ausgeführt wird.
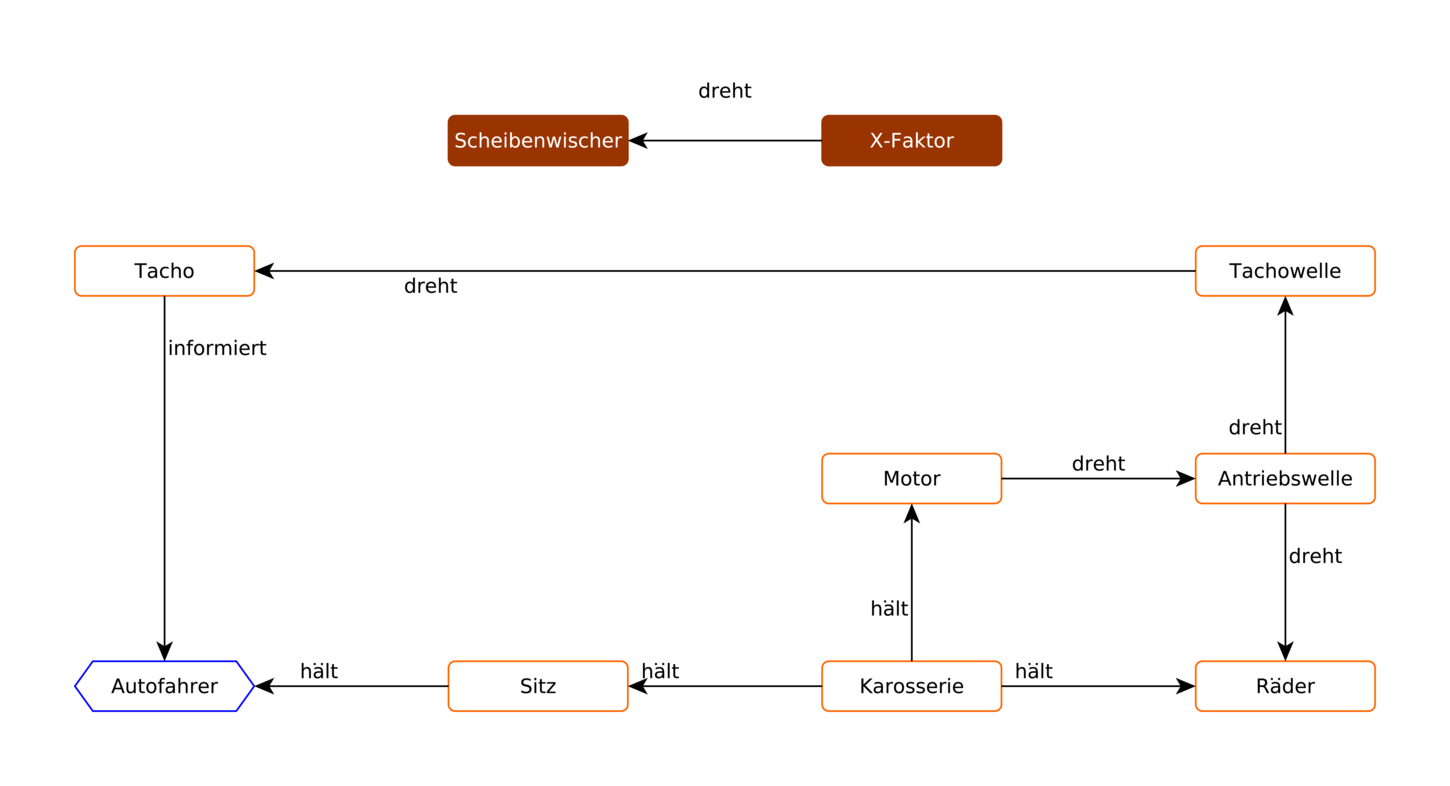
Hinzufügen eines X-Faktors
Der X-Faktor wird jetzt getrimmt. Gemäß den Trimmingregeln wäre der beste Kandidat für den Funktionsübertrag eine vorhandene Komponente, die bereits jetzt die Scheibenwischer dreht – eine solche Komponente gibt es jedoch. Zweitbeste Option ist nach den entsprechenden Richtlinien eine Komponente, die bereits jetzt etwas anderes dreht. Hiervon gibt es in einem Auto mehrere. Für den Antrieb der Scheibenwischer wird nur eine kleine Leistung benötigt; die Antriebswelle wäre daher für diesen Zweck überdimensioniert. Sinnvoller ist es, die Drehung der Tachowelle zu verwenden.
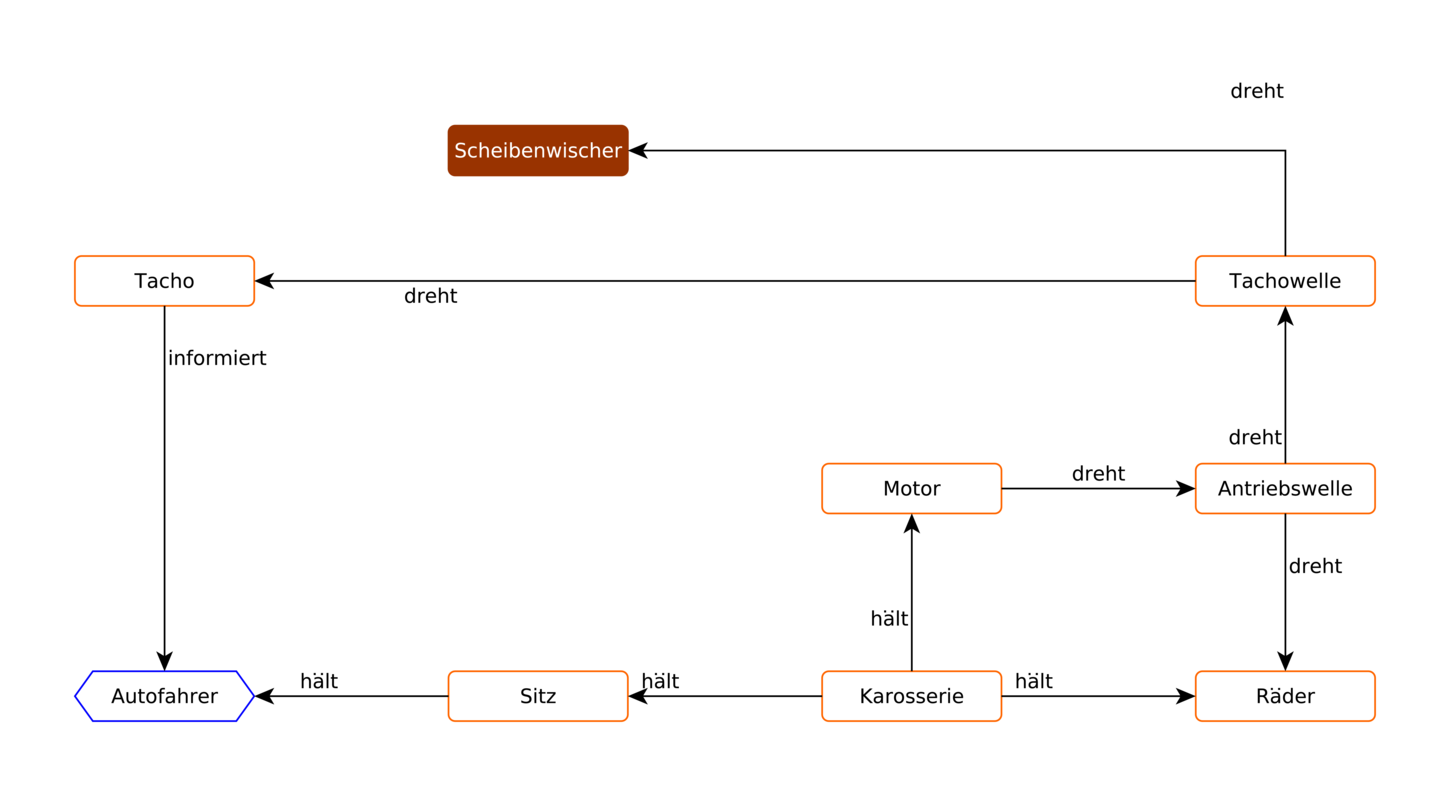
Trimmen des X-Faktors
Der Ansatz, die Tachowelle als Antrieb für den Scheibenwischer zu verwenden, erscheint auf den ersten Blick vielleicht absurd – dieser Ansatz wurde aber tatsächlich umgesetzt: Die erste Serie des Citroën 2CV, bekannter unter dem Spitznamen „Ente“, besaß keinen eigenen Antrieb für den Scheibenwischer, sondern verwendete die Tachowelle zu diesem Zweck. Nachteil dieses Ansatzes ist es, dass die Geschwindigkeit der Scheibenwischer von der aktuellen Fahrgeschwindigkeit abhängt.

Im Citroën 2CV werden die Scheibenwischer von der Tachowelle angetrieben.
Das Hinzufügen einer virtuellen Komponente, die schädliche Funktionen bewirkt, ist ein Vorgehen im Rahmen der antizipierenden Fehlererkennung. Je nach Aufgabe kann eine antizipierende Fehlererkennung auf zwei verschiedene Arten eingesetzt werden.
Die schädliche Funktion eines technischen Systems ist bereits aufgetreten, ihre Ursache ist jedoch (noch) unbekannt. Insbesondere ist also nicht bekannt, welche Komponente des technischen Systems für die schädliche Funktion verantwortlich ist. Zur weiteren Analyse wird jetzt eine virtuelle Komponente, die genau die beobachtete schädliche Funktion hervorruft, in das technische System eingeführt und anschließend wieder getrimmt.
Beim Trimming wird die schädliche Funktion auf eine der vorhandenen Systemkomponenten übertragen – im Rahmen dieses fiktiven Modells ist die betreffende Systemkomponente dann „schuld“ an der schädlichen Funktion. Auch wenn es sich nur um ein fiktives Modell handelt, so ist es trotzdem wahrscheinlich, dass auch in der Realität diese Komponente die Ursache für die beobachteten Probleme ist. Folgende Analysen sollten sich daher erst einmal auf diese Komponente konzentrieren.
Die schädliche Funktion ist noch nicht aufgetreten, aber man hat die Befürchtung, dass sie in der Zukunft auftreten könnte. Auf diese Weise kann geprüft werden, ob ein Produkt, das man auf den Markt bringen möchte, bereits marktreif ist. Auch hier wird wieder eine virtuelle Komponente, die die schädliche Funktion ausübt, in das technische System eingefügt. Anschließend wird wieder versucht, diese virtuelle Komponente zu trimmen.
Findet man keine sinnvolle Möglichkeit des Trimmens, so können die im System vorhandenen Komponenten die befürchtete schädliche Funktion nicht hervorrufen; das System kann so auf den Markt gebracht werden. Findet man dagegen eine praktikable Möglichkeit des Trimmings durch Übertragung der schädlichen Funktion auf eine bereits im System vorhandene Komponente, so kann gezielt diese Komponente verbessert werden, um spätere Probleme zu verhindern.